





















GNSS RTK Modul LG290P Quad-Band L1 L2 L5 E6 Centimetrová Přesnost
Regular price:
 ・Kup teraz i zapłać za 30 dni
・Kup teraz i zapłać za 30 dni
product unavailable

Modul GNSS RTK LG290P – Čtyřpásmový L1+L2+L5+E6, Centimetrová přesnost, Multi-konstelace
LG290P je moderní čtyřpásmový navigační modul, který zajišťuje extrémně přesné určení polohy. Díky podpoře více satelitních systémů (jako jsou GPS, GLONASS, Galileo) a současnému provozu na čtyřech frekvencích (L1, L2, L5, E6) pracuje zařízení stabilně a přesně.
Použitá technologie RTK (Real-Time Kinematic) umožňuje dosáhnout přesnosti v řádu centimetrů, což je klíčové pro profesionální aplikace. Modul je vybaven inteligentními funkcemi potlačení rušení, díky čemuž si skvěle poradí i v náročném prostředí. Jeho kompaktní rozměry a konstrukce usnadňující montáž (castellated holes) z něj činí ideální řešení pro stavbu robotů, dronů, autonomních vozidel a systémů pro precizní zemědělství.
Klíčové vlastnosti:
- Podpora více konstelací GNSS: GPS, GLONASS, Galileo, BDS, QZSS, NavIC
- Čtyřpásmový příjem (L1 + L2 + L5 + E6) pro vyšší přesnost a lepší odolnost proti rušení
- Diferenciální polohování RTK s centimetrovou přesností a hlášení stavu v reálném čase
- Kompaktní velikost a konstrukce s kovenými otvory (castellated holes)
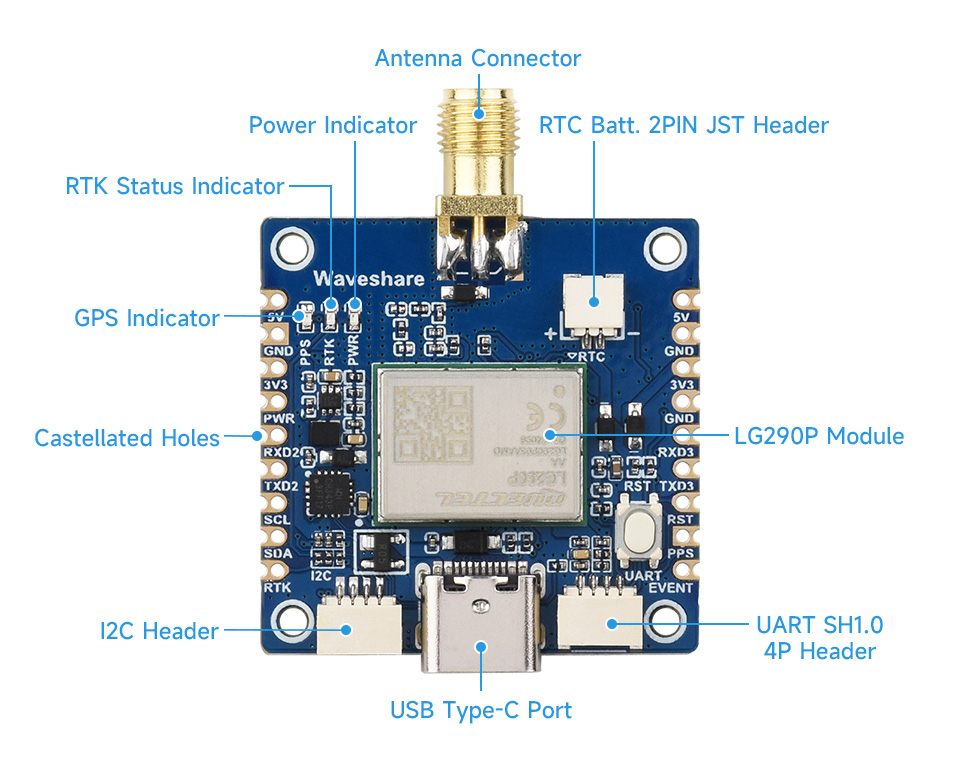
- Integrovaný port USB Typ-C podporující komunikaci UART-USB a napájení modulu
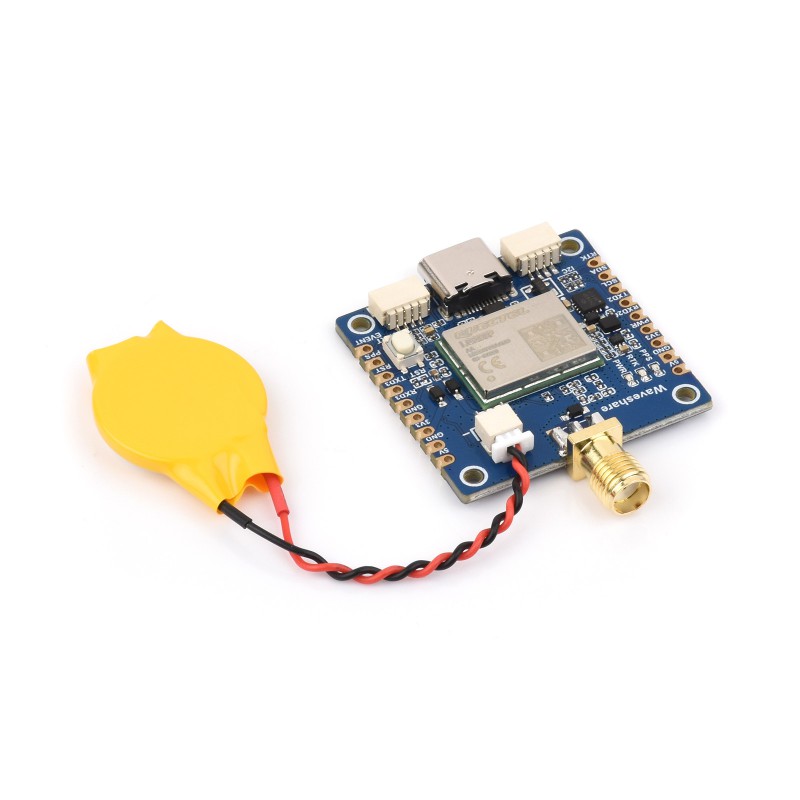
- Konektor JST 2-pin pro připojení záložní baterie RTC (rychlejší start – Hot Start)
- 3 LED diody signalizující provozní stav modulu
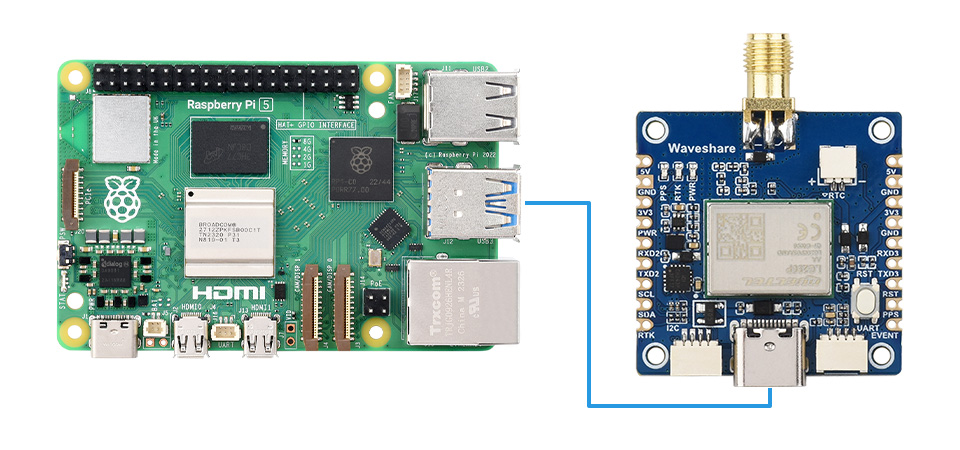
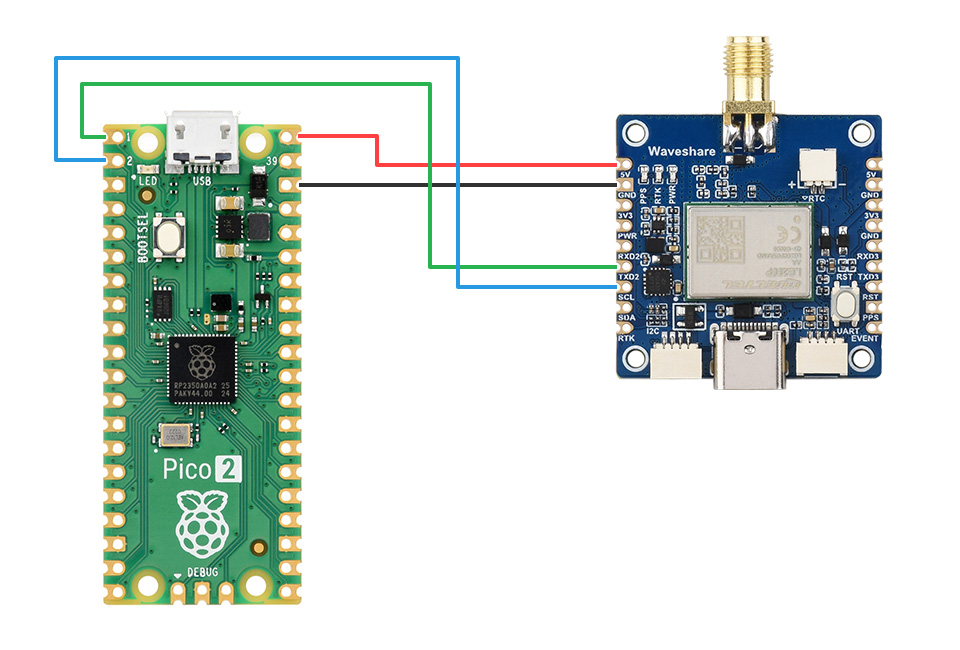
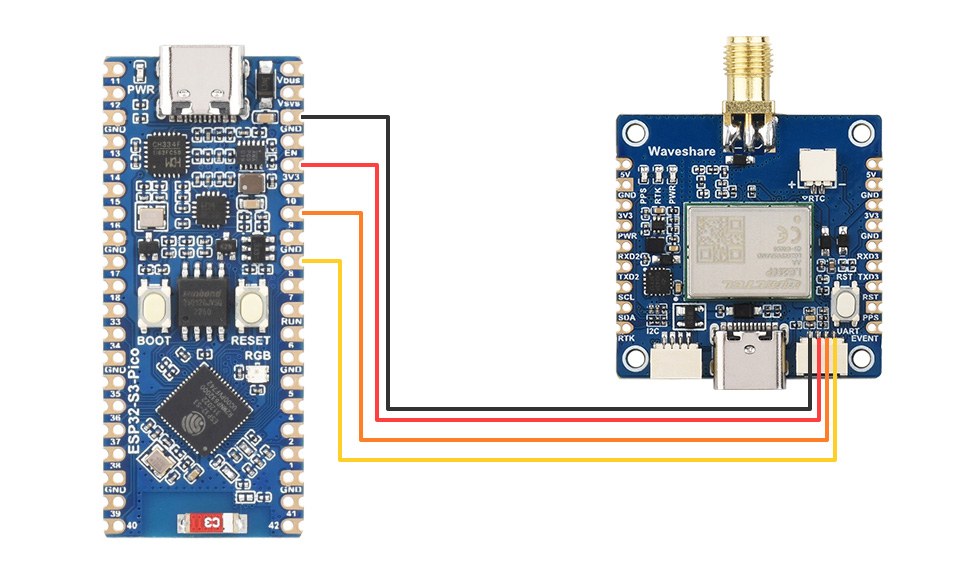
- Podpora více platforem: Raspberry Pi, Pico, Jetson Orin, ESP32, Arduino
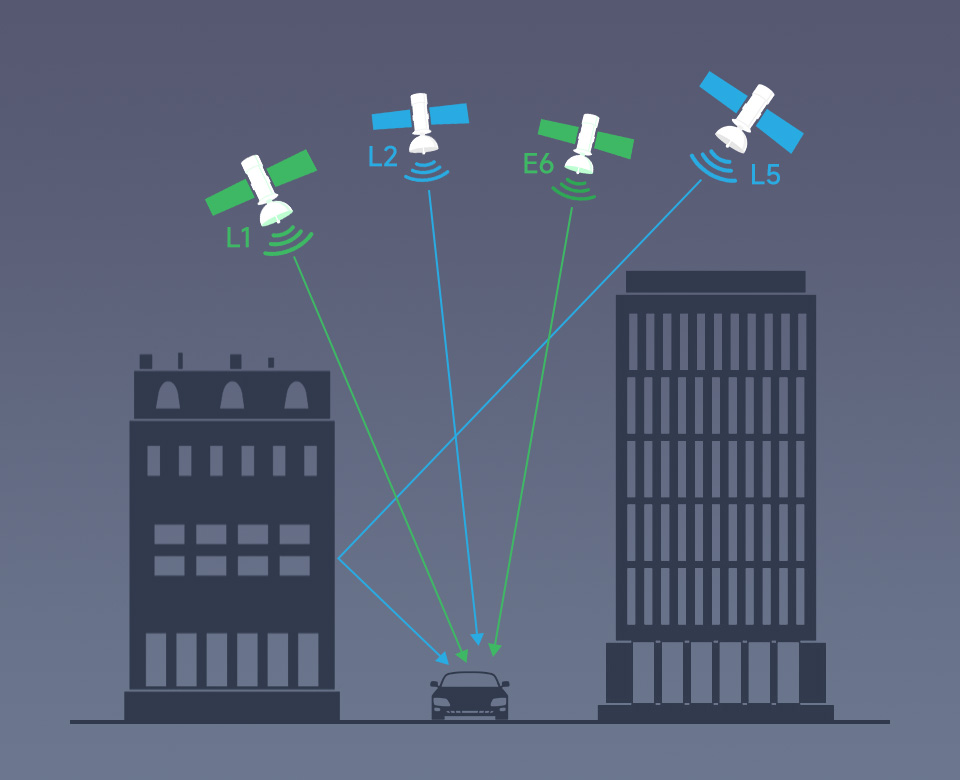
Technologie čtyřpásmového polohování L1 + L2 + L5 + E6
Modul podporuje současné sledování satelitních signálů ve více pásmech, což snižuje efekty vícecestného šíření (např. v městské zástavbě) a výrazně zlepšuje přesnost polohování.
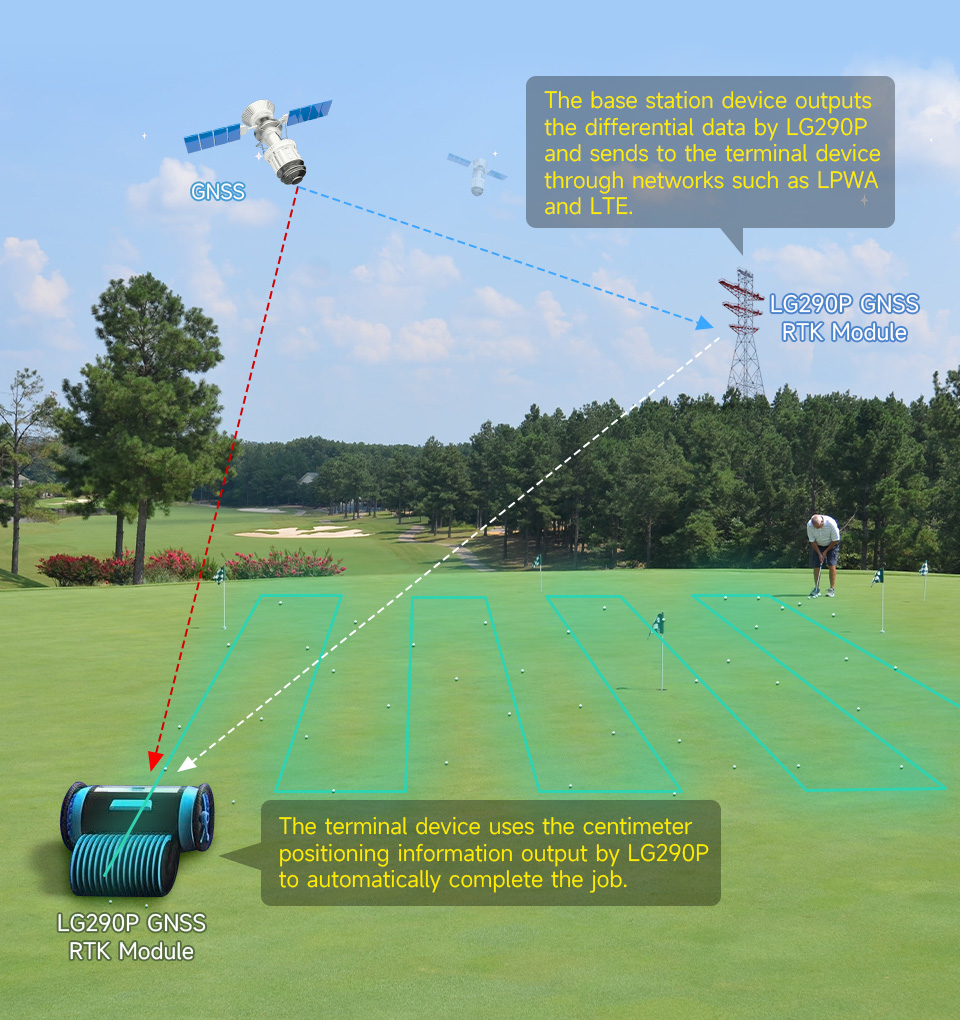
Režimy provozu RTK: Základnová stanice a Rover
Dva moduly LG290P mohou pracovat jako základnová stanice a mobilní stanice (Rover). Nastavení základnové stanice na známých souřadnicích nebo využití placených korekčních služeb umožňuje odesílání kalibračních dat do terminálu (Rover). To umožňuje eliminaci chyb a dosažení centimetrové přesnosti během několika sekund.
Současný příjem více systémů GNSS
Podpora GPS, BDS, GLONASS, Galileo, QZSS a NavIC při zachování nízké spotřeby energie.
Podpora systémů WAAS, EGNOS, BDSBAS, MSAS, GAGAN, SDCM umožňuje korekci chyb v reálném čase, čímž zlepšuje spolehlivost v obtížných podmínkách.

Kompatibilita s vývojovými platformami
K dispozici jsou příklady a manuály pro Raspberry Pi, Raspberry Pi Pico, Jetson Orin, ESP32 a Arduino.
Technická specifikace:
- Podporovaná pásma:
GPS: L1 C/A, L1C, L5, L2C
GLONASS: L1, L2
Galileo: E1, E5a, E5b, E6
BDS: B1I, B1C, B2a, B2b, B2I, B3I
QZSS: L1 C/A, L1C, L5, L2C, L6
NavIC: L5
SBAS: L1 - Souběžné GNSS: 5 + QZSS
- Systémy SBAS: WAAS, EGNOS, BDSBAS, MSAS, GAGAN, SDCM
- Funkce RTK: Rover a Base
- Přesnost polohování (RTK): 0.8cm + 1ppm CEP
- Přesnost polohování (PVT): 0.7m CEP
- Frekvence aktualizace: Výchozí 10Hz (Max. 20Hz)
- Čas konvergence RTK: <5s
- Čas do první fixace (Cold start): 28s
- Čas do první fixace (Hot start): 1.7s
- Citlivost (Tracking): -160dBm
- Přesnost rychlosti: 0.03m/s
- Přesnost PPS: 5ns
- Rozhraní: USB, UART (výchozí 460800bps)
- Protokol: NMEA 0183 / RTCM 3.x
- Napájení: 5V
- Spotřeba proudu: <100mA @ 5V (nepřetržitý režim)
- Pracovní teplota: -40~85℃
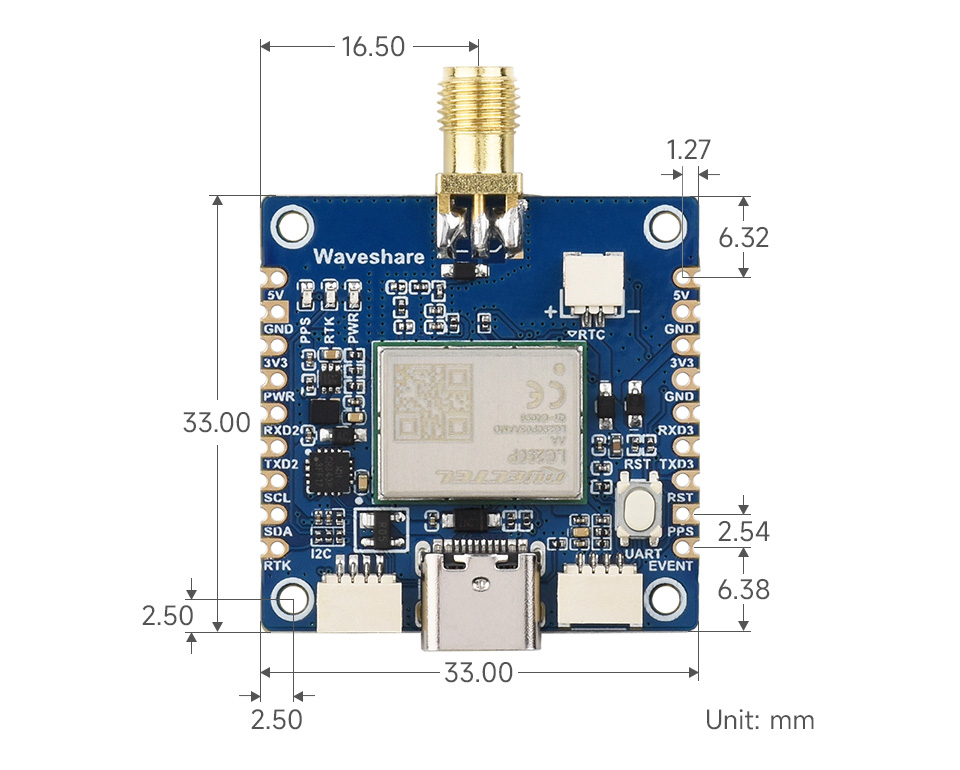
- Rozměry: 33 × 33 mm
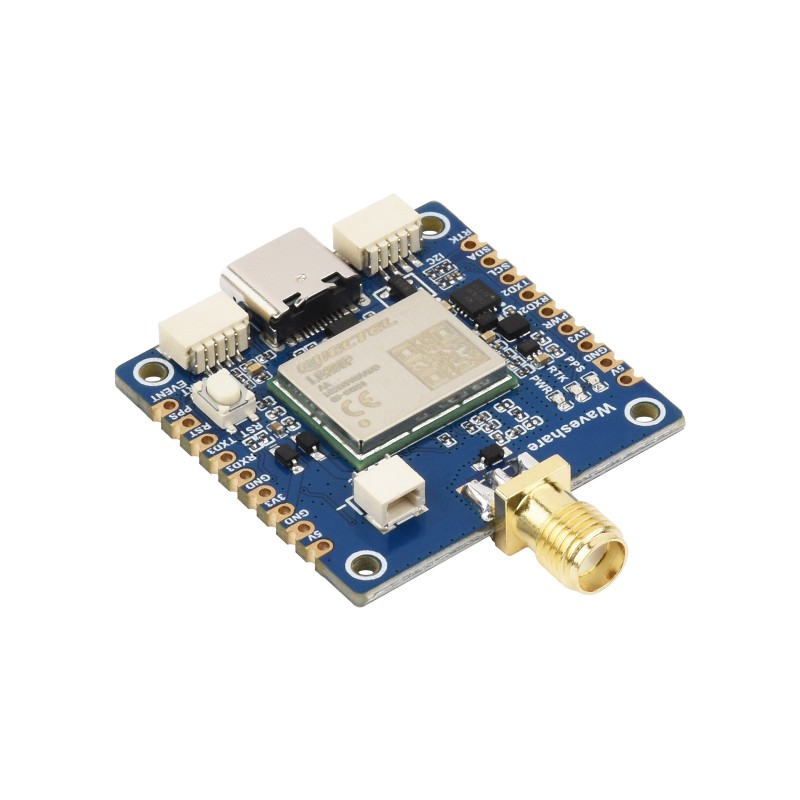
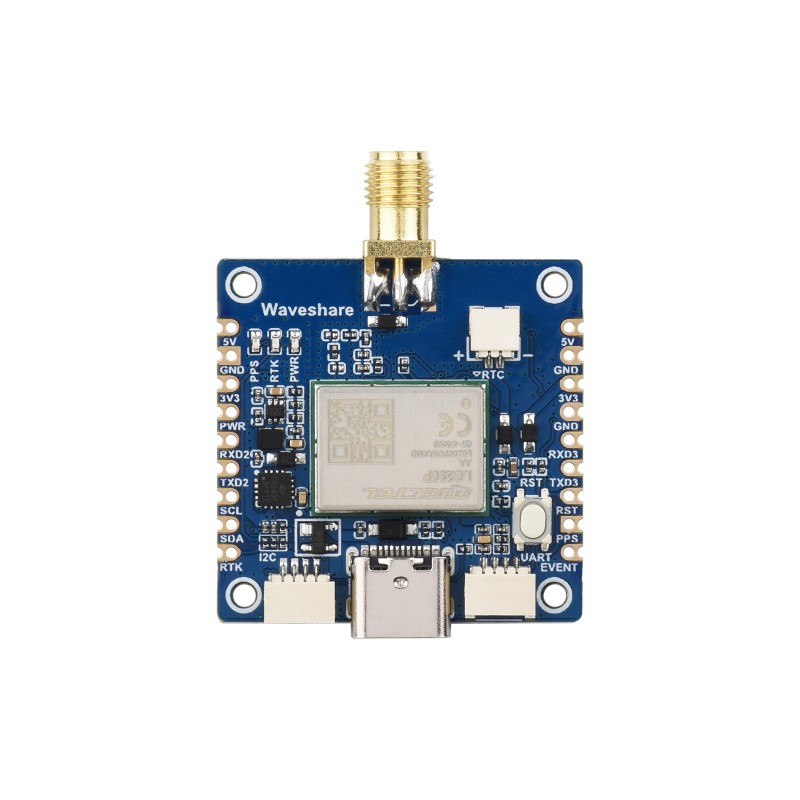
Popis prvků na desce
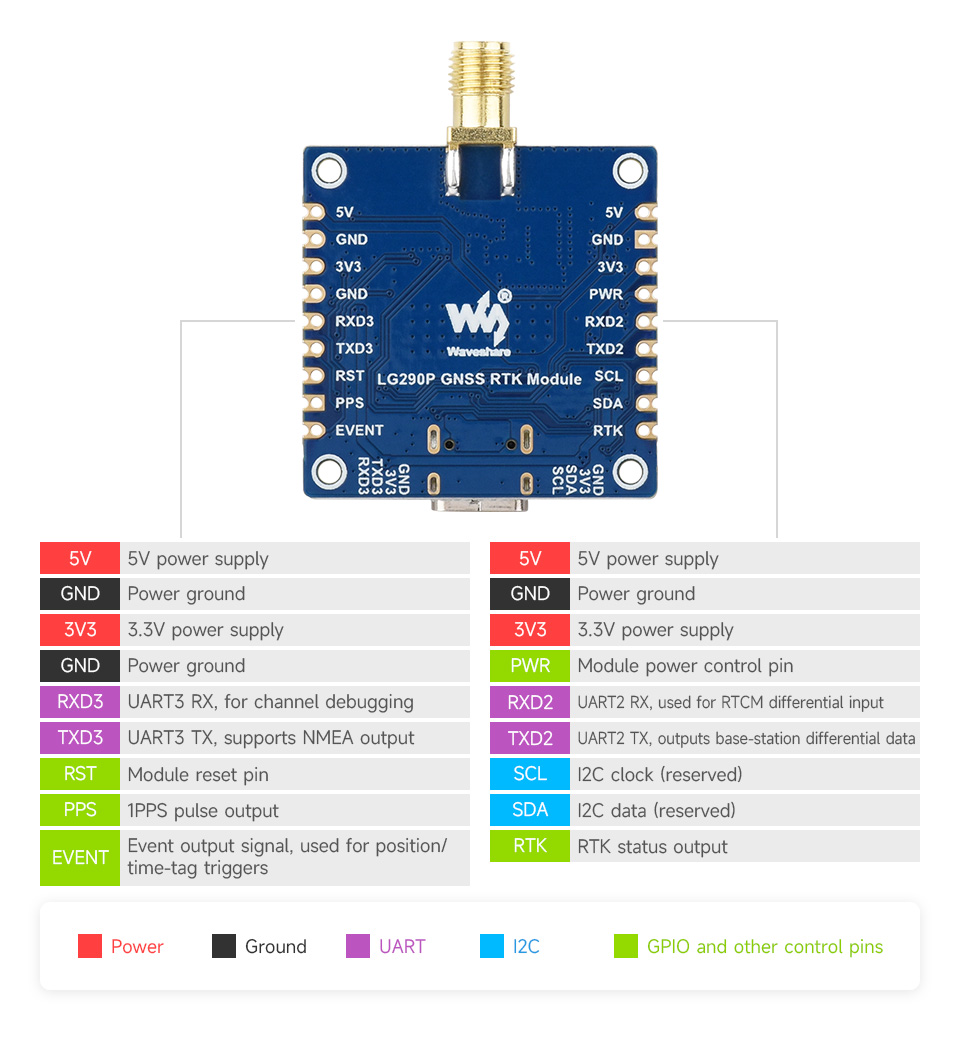
Definice vývodů
Vnější rozměry
Obsah balení
- Modul LG290P GNSS RTK x1
- Aktivní anténa GNSS x1
- Konektor goldpin 2.54mm x2
- Kabel SH1.0 4PIN (~150mm) x2
- Baterie RTC (konektor JST 2PIN) x1











