


HAT pro Raspberry Pi GPS přijímač MAX-M8Q
Regular price:
 ・Kup teraz i zapłać za 30 dni
・Kup teraz i zapłać za 30 dni
product unavailable

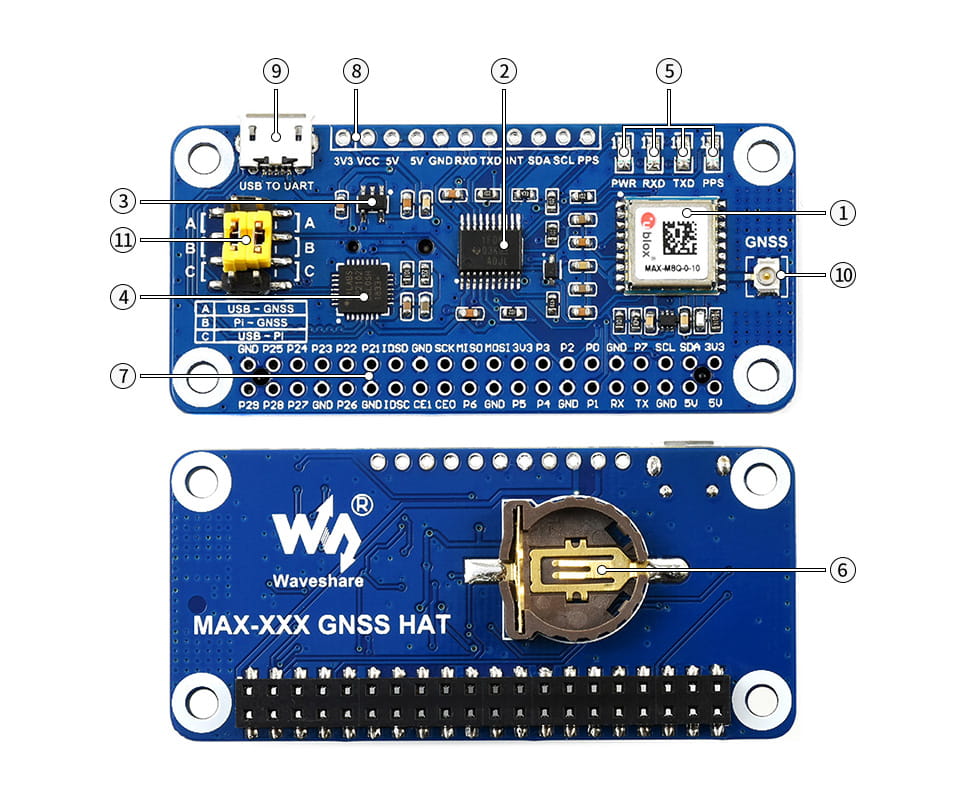
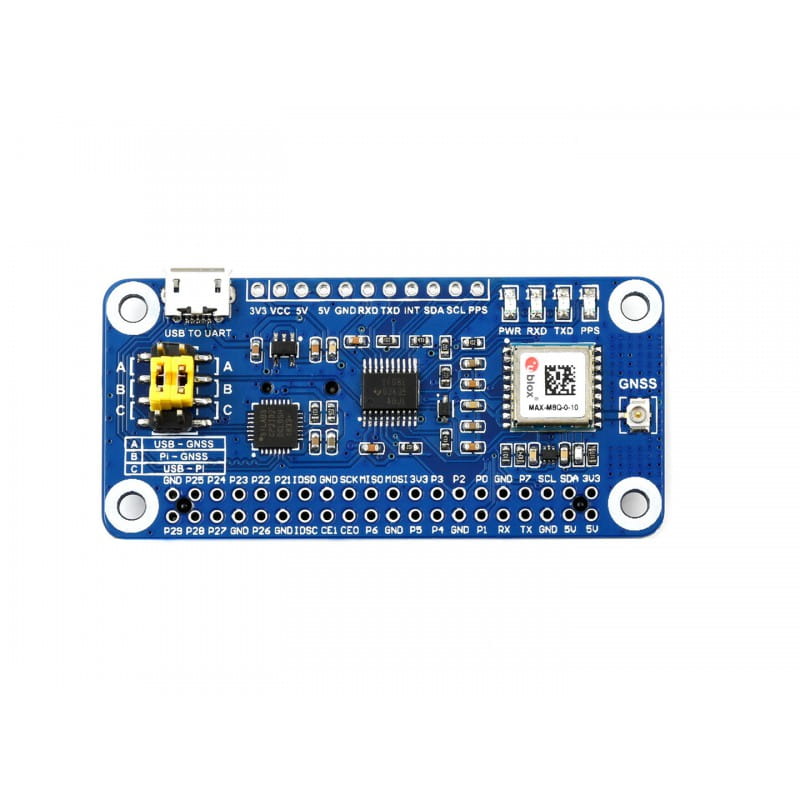
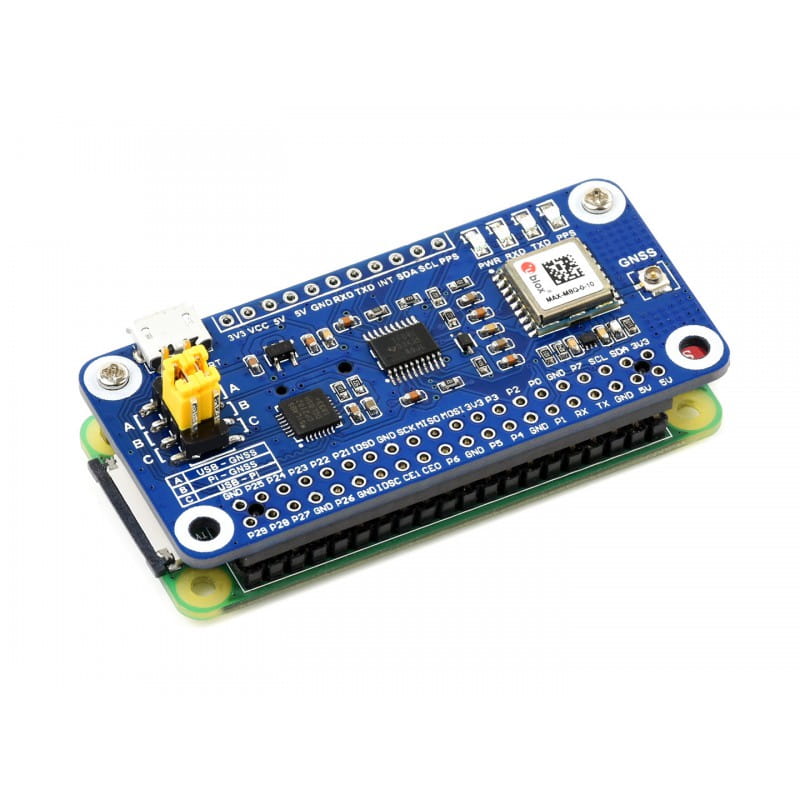
Klobouk pro Raspberry Pi s přijímačem GPS u-blox MAX-M8Q podporujícím systémy určování polohy: GPS, Beidou, Galileo a GLONASS. Součástí desky modulu je také adaptér umožňující komunikaci přes USB a měnič napětí pro zajištění kompatibility modulu se systémy napájenými 5 V, jako je Arduino.
Hlavní vlastnosti modulu:
- Současný příjem až 3 typů satelitních systémů GNSS GPS, Beidou, Galileo a GLONASS při zachování nízké spotřeby energie .
- Podpora augmentačních systémů, včetně SBAS, QZSS, IMES, D-GPS, zlepšující výkon při určování polohy služby
- Podpora A-GNSS (Assisted GNSS), zkrácení doby prvního určení polohy po zapnutí, zlepšení citlivosti akvizice
- Vysoká citlivost navigace (-167 dBm ) a výjimečná schopnost zabránit podvržení a rušení, podporuje geo-fencing .
- Podporuje U-Center, snadný způsob konfigurace modulu
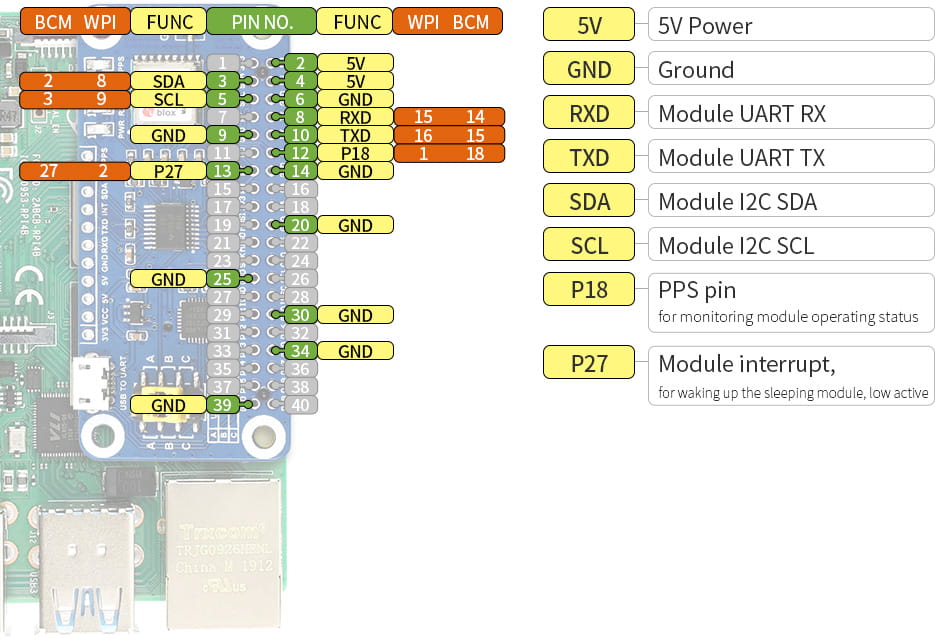
- Standardní konektor Raspberry Pi 40PIN GPIO, podporuje desky řady Raspberry Pi, Jetson Nano
- Vestavěný převodník USB na UART CP2102 pro sériové ladění .
- Rozhraní UART a I2C modulu pro propojení s hostitelskými deskami, jako je Arduino / STM32 .
- Rozsah přenosové rychlosti: 4800 ~ 921600bps (výchozí: 9600bps)
- Podporuje rozhraní DDC (kompatibilní s I2C): až 400 KHz (max.)
- Vestavěný držák baterie, podporuje baterii ML1220, pro ukládání efemerid a horké starty .
- 4x LED diody indikující provozní stav modulu .
- Příklady ovládání pro Raspberry Pi / Jetson Nano / Arduino / STM32
| Specifikace přijímače GNSS | .|||||||||
|---|---|---|---|---|---|---|---|---|---|
| MAX-M8Q | .GPS & GLONASS | .GPS | GLONASS | .BeiDou | .Galileo | ||||
| Frekvenční pásmo | .72x kanálů motoru u-blox M8 GPS L1C/A, SBAS L1C/A, QZSS L1C/A, QZSS L1 SAIF, GLONASS L1OF, BeiDou B1I, Galileo E1B/C | ||||||||
| Přesnost horizontálního polohování | .2,5 m CEP | .2,5 m CEP | 2,5 m CEP | 4,0 m CEP | .3,0 m CEP | .- | |||
| Max. rychlost aktualizace navigace | .10Hz | .18Hz | 18Hz | 18Hz | 18Hz | ||||
| Čas do první opravy | .Studené starty | .26s | 29s | 30s | 34s | 45s | |||
| Horké starty | 1s | 1s | 1s | 1s | 1s | ||||
| Podporované starty | .2s | 2s | 2s | 3s | 7s | ||||
| Citlivost | .Sledování a navigace | .-167 dBm | -166 dBm | Rowspan="4">Citlivost | -166 dBm | -166 dBm | -166 dBm | .-166 dBm | -160 dBm | -166 dBm | .-160 dBm | -159 dBm |
| Zpětné získání | -160 dBm | -160 dBm | -156 dBm | -157 dBm | -153 dBm | ||||
| Studené starty | -148 dBm | -148 dBm | -145 dBm | -143 dBm | -138 dBm | ||||
| Horké starty | -157 dBm | -157 dBm | -156 dBm | -155 dBm | -151 dBm | ||||
| Přesnost PPS | .RMS | 30ns | 30ns | 30ns | 30ns | 30ns | |||
| 99 % | 60ns | 60ns | 60ns | 60ns | 60ns | ||||
| Frekvence PPS | .0,25Hz...10MHz (konfigurovatelné) | .||||||||
| Přesnost rychlosti | .0,05 m/s | .||||||||
| Přesnost hlavičky | .0,3 stupně | .||||||||
| Provozní limity | .Zrychlení (max.): 4g | ||||||||
| Nadmořská výška (max): 50000m | |||||||||
| Rychlost (max.): 500m/s | |||||||||
| Další údaje | .|||||||||
| Komunikace | .UART (4800~921600b/s, výchozí 9600b/s), I2C (max. 400KHz) | .||||||||
| Frekvence aktualizací | .1Hz (výchozí), 18Hz (max.) | .||||||||
| Protokol | .NMEA 0183 verze 4.0 (konfigurovatelná V2.1, V2.3 nebo V4.1), UBX, RTCM 2.3 | .||||||||
| Napájecí napětí | .5V | .||||||||
| Současná spotřeba | Současná spotřeba | <40mA@5V | .|||||||
| Aktuální spotřeba systému GNSS | 23mA@3V (v nepřetržitém režimu) | ||||||||
| Přípustné provozní teploty | .-40 ℃ ~ 85 ℃ | .||||||||
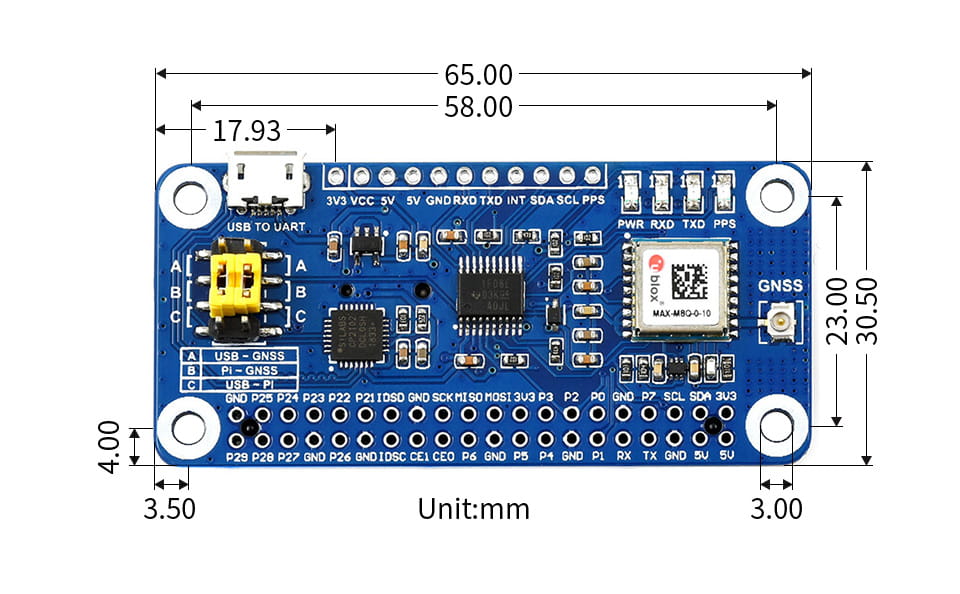
| Rozměry | .65 mm × 30,5 mm | .||||||||