



















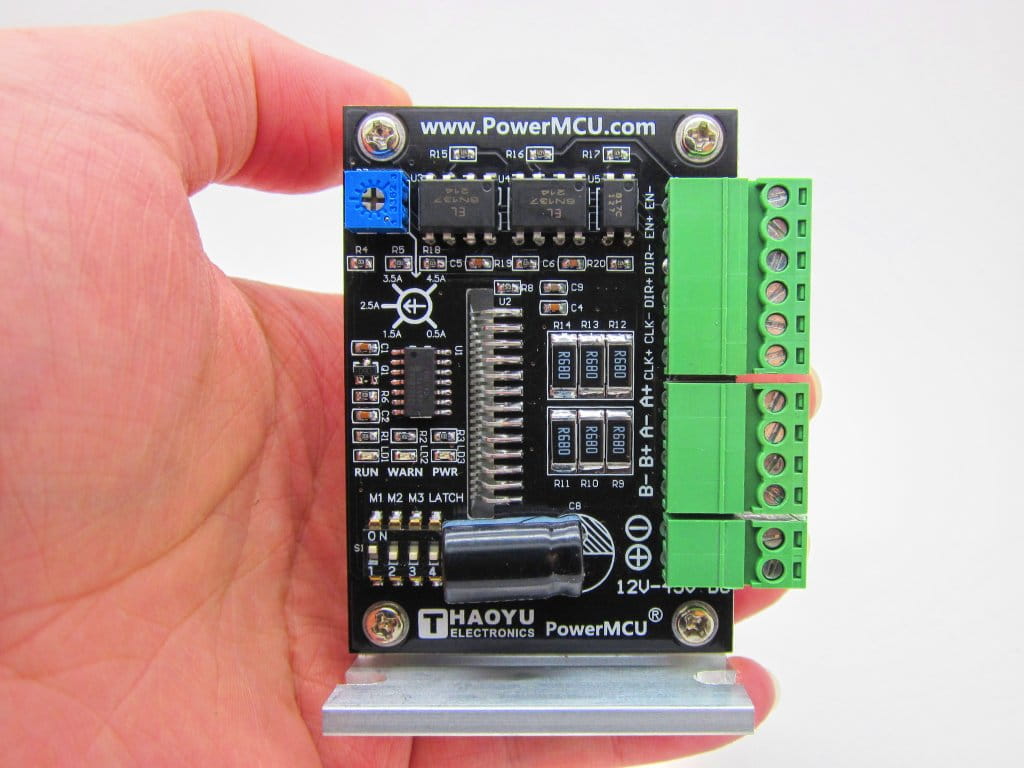

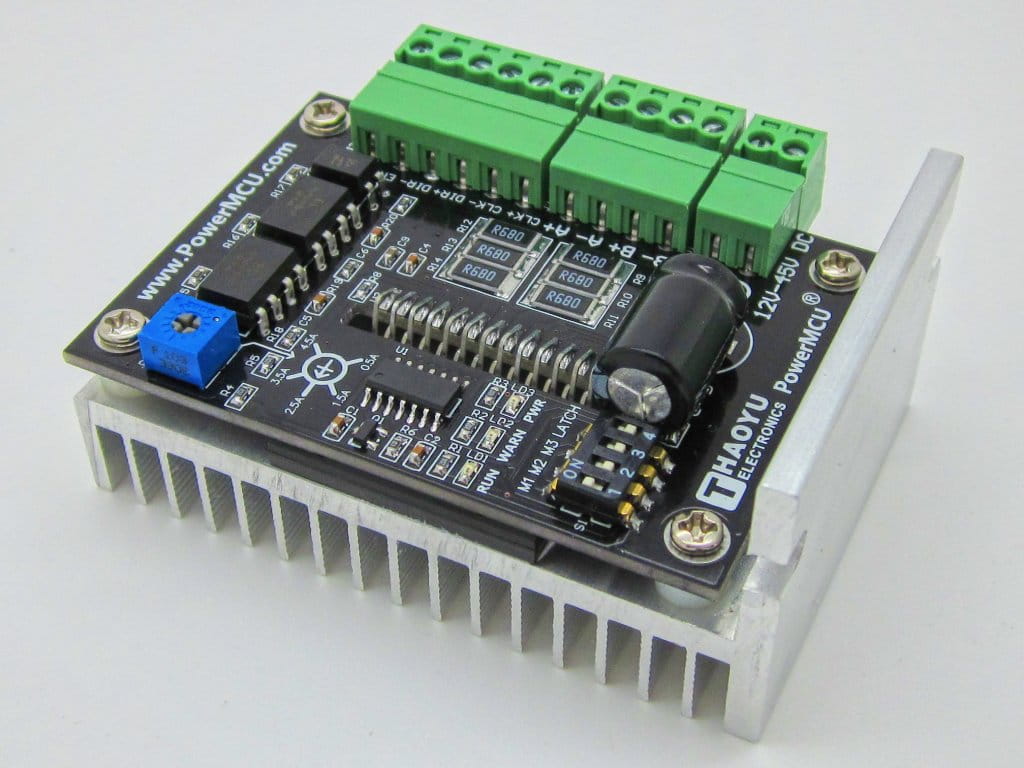


Sterownik silników krokowych z układem TB6600
Cena regularna:
 ・Kup teraz i zapłać za 30 dni
・Kup teraz i zapłać za 30 dni
towar niedostępny
Układ TB6600HQ to kontroler-driver silników krokowych bipolarnych. Wykorzystuję technikę PWM w celu sterowania mikro-krowego.
Rotacja w przód i w tył jest dostępna w trybach 2-phase, 1-2-phase, W1-2-phase, 2W1-2-phase, i 4W1-2-phase.
Dwufazowy bipolarny sygnał może być wytwarzany poprzez jeden sygnał zegarowy o wysokiej stabilności.
TB6600 Właściwości.
- Pojedynczy układ kontrolera silników bipolarnych, krokowych z sinusoidalnym mikrokrokiem.
- BiCD 0.13 (50 V) proces.
- Rezystancja kluczy (górny + dolny) = 0.4 Ω (typ.)
- Dwukierunkowa rotacja.
- Pięć trybów mikro-kroków. (1/1, 1/2, 1/4, 1/8, and 1/16 step)
- Wyjściowa wytrzymałość napięciowa: VCC = 50 V
- Prąd wyjściowy: IOUT = 5.0 A (wartość nieprzekraczalna, impuls, 100ms) IOUT = 4.5 A (zakres pracy, maksymalna wartość)
- Obudowa: HZIP25-1.00F
- Zawiera wejściowe rezystory typu pull-down : 100 kΩ (typ.)
- Wyjście monitorujące (ALERT): obciążalność = 1 mA
- Wyjście monitorujące (MO): obciążalność = 1 mA
- Posiada pin RESET oraz pin ENABLE.
- Funkcja gotowości.
- Pojedyncze napięcie zasilania.
- Obwód ochrony termicznej (TSD).
- Układ blokady wyjść przy za małym napięciu (UVLO).
- Układ zabezpieczenia obciążeniowego(ISD).

Uwagi
Moduł pracuje z napięciem 12V do 48V. Idealny dla silników dwu-fazowych 4.5A.
1. Tryby pracy
Osiem trybów pracy można ustawić używając wejść M1, M2, M3. Przebieg prądu może nie być kontynuowany jeśli nastąpi zmiana stanu wejść podczas pracy.
| INPUT | Mode(Excitation) | ||
| M1 | M2 | M3 | |
| OFF | OFF | OFF | Stan oczekiwania (Operacje wewnętrzne są zatrzymane) |
| OFF | OFF | ON | 1/1 (2-phase tryb pełno-krokowy) |
| OFF | ON | OFF | 1/2A type (1-2 mikro-krok typ A) ( 0% - 71% - 100% ) |
| OFF | ON | ON | 1/2B type (1-2 mikro-krok typ B) ( 0% - 100% ) |
| ON | OFF | OFF | 1/4 ( mikro-krok typ W1-2) |
| ON | OFF | ON | 1/8 ( mikro-krok typ 2W1-2) |
| ON | ON | OFF | 1/16 ( mikro-krok typ 4W1-2) |
| ON | ON | ON | Tryb oczekiwania (Operacje wewnętrzne zatrzymane) |
Uwaga: Ustawienie M1 = M2 = M3 = L lub M1 = M2 =M3 = H powodują przejście w tryb oczekiwania.
Tryb oczekiwania
Przejście w tryb oczekiwania wymusza ustawienie M1 = M2 = M3 = L or M1 = M2 = M3= H.
Pobór mocy jest zminimalizowany poprzez wyłączenie wszystkich operacji z wyjątkiem operacji zabezpieczających.
W trybie oczekiwania wyjściowe piny MO są w trybie HZ.
Wyjście z trybu oczekiwania następuje po zmianie stanów na inne niż M1 = M2 = M3 = L or M1 = M2 = M3 = H.
Po wyjściu ze stanu oczekiwania wejściowe sygnały są ignorowane jeszcze przez około 200μs.
2. Ustawienie zatrzasku zatrzymania.
| WEJŚCIE | TRYB |
| Latch/Auto | |
| ON | Automatyczne wyjście |
| OFF | Pozostaje zatrzaśnięty |
Uwaga: Tryb powrotu ze stanu blokady po wykryciu przeciążenia(ISD) lub ochrony termicznej(TSD) ustalany jest wejściem LATCH/AUTO. Kiedy nastąpi ISD lub TSD dioda ostrzegawcza będzie włączona.
 M1 = M2 = M3 = LATCH = ON
M1 = M2 = M3 = LATCH = ON
 M1 = M2 = M3 = LATCH = OFF
M1 = M2 = M3 = LATCH = OFF
3. Output current mode
 0.5A mode
0.5A mode
 2.5A mode
2.5A mode
 4.5A mode
4.5A mode
Wysyłka zawiera:
- HY-TB6600-Module X 1


![]() Sprawdź także:
Sprawdź także:










